
THIS EVENT HAS BEEN CANCELLED DUE TO THE PANDDEMIC RESTRICTIONS
What is the IROS 2021 Mobile Manipulation Hackathon?
The challenge
Mobile manipulation is gaining traction in recent years, with potential applications in diverse areas including manufacturing, logistics, and healthcare. These applications typically require complex manipulation tasks in both structured and unstructured environments, possibly in cooperation or close interaction with humans. Different fields are involved: perception, navigation, task and path planning, control, error recovery, and human-robot interaction. Each field is an area of research on its own, but the special challenge in mobile manipulation is to obtain an integrated system that can combine a large variety of hardware and software components to increase the range of tasks that the robot can perform. With this hackathon, the researchers from these different fields will have an opportunity to integrate their contributions into a mobile manipulation system, and to perform a live demonstration at IROS.
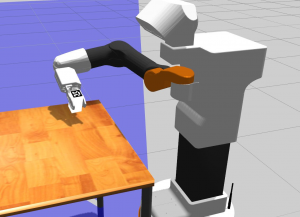
Different companies are offering mobile robots as a commercial product. For instance, PAL Robotics offers TIAGo and TIAGo++, a mobile robot platform endowed with up to two 7 DoF arm, a liftable torso and a pan-tilt head.


Manipulation
Navigation
Perception
Robotics
Participants will extend the capabilities of TIAGo and TIAGo++, provided with out-of-the-shelf capabilities for navigation, motion planning, perception and HRI, by integrating their contributions. We leave the exact field of these contributions unspecified; they may be case-driven applications, new planners, perception systems, sensors, actuators, etc. The requirement is that the participants integrate their contribution into a mobile bi/manipulation system to show its current capabilities or extend/enhance it. The participants will be able to integrate their contributions first in simulation, which will later be implemented on the real robot with the support of PAL researchers and engineers.
The hackathon will provide an opportunity to IROS participants to experiment with a mobile manipulation system, to showcase their particular research, and demonstrate the maturity of the field to the community at large.
Competition is open to any Academic, Research or Industrial Organization interested in mobile manipulation.


How to participate
Timeline and selection process
Rules and Scoring System
1. Initial, classificatory phase:
Participants will profit from the 100% ROS based simulation of TIAGO and TIAGo++ to develop, in the commodity of their labs, an initial proposal of demonstration, which should necessarily and effectively use the potential of a mobile robot (e.g. the proposed demonstration cannot be solved with a fixed-base manipulator only). Participants can exploit the TIAGo/TIAGo++ ROS tutorials and demonstrations already available publicly in:
A video of this initial demonstration will be submitted for evaluation of entry into the Hackathon main event at the IROS conference.
The Webots simulator might potentially be used as well for easing the setup of the simulation environment of each participant
Six teams will be selected from this initial phase to compete remotely.
2. Hackathon @IROS virtual event
Selected teams will have the possibility of working in the PAL Robotics headquarters in Barcelona for a maximum period of one week, prior to the IROS competition, to implement and test their demonstration. Transfer from simulation to the real hardware will be supported by PAL Robotics to guarantee the success of the implementation. These implementations will be then showcased at IROS during two Hackathon days.
Demonstrations are not only restricted to software applications or use-case demonstrations. Enhancement of the PAL Robotics robot capabilities through novel sensors or hardware are also supported and encouraged.
Final evaluation will be carried out by a team of three internationally recognized experts, considering the following aspects:
Scientific and technical quality (0-5 points)
Robustness of demonstration (0-5 points)
Potential utility/impact of results (0-5 points)
Program of activities – final competition
Six finalist teams will demonstrate their applications in the central event at the virtual IROS event. Each team will have a TIAGo STEEL or TIAGo++ robot available for on-site final testing during 7 hours, and at the end of the day each team will make the official presentation for the Hackathon contest. PAL Robotics will set up a remote lab where participants can run their code on a real robot with the support of the engineering team of PAL Robotics.
Day 1 (Part 1 – three teams) and 2 (Part 2 – three teams):
9am-4pm: Final testing of the demonstration.
4-5:30pm: team demonstrations. Each team will have 30 min to present their demonstration. The first 5-10 minutes will be used to explain their problem/approach. This information will also be visible in one poster per team (all posters will be in display during the competition days).
The demonstration will be streamed for the IROS audience.
5:30-6pm: Judges will deliberate and score the teams.
The platform

TIAGo /TIAGo++ is a ROS-based mobile manipulator robot developed by PAL Robotics with the goal of assisting people in diverse contexts. TIAGo stands for “Take It And Go!”, which summarizes the robot’s skills: navigation, perception and manipulation.
The service robot combines a robust autonomous navigation with perception and manipulation to smartly interact with the environment. TIAGo is provided with Human Robot Interaction skills that go from face and object recognition to the capability of speech, with several languages integrated.
Its open source software and modular hardware architecture make TIAGo highly customizable and adaptable to different purposes. Extra sensors, devices, tools and interchangeable end-effectors can be easily integrated to the robot and connected via its expansion panel.
This platform is currently used by multiple teams in competitions such as RoboCup and European Robotics League, and stands as one of the most used robots for research in universities and innovation centers all over the world.
What do you get as a finalist?
Free use of a TIAGo and TIAGo++ platforms during IROS 2021
PAL Robotics will make available up to 2 TIAGo robots for the finalists during the Mobile Manipulation Hackathon demos at IROS 2021. Besides the platform, engineers from PAL Robotics will assist the teams to help them integrate the demos on site. Get the opportunity to use this platform and apply your developments in mobile manipulation!
Each team is responsible for bringing any additional hardware they might require for their demonstration (e.g. conveyor belt, shelves, storage units, etc).
One week intensive training and integration in Barcelona
PAL Robotics will offer the finalists up to one week of training, integration, and testing of their solution on the TIAGo robots available at PAL Robotics’ offices in sunny Barcelona. Once the finalists are selected, PAL Robotics will get in touch for hosting the training at their offices, ideally one week before IROS 2021.
The teams participating will receive support for integrating different hardware and software elements needed for their demos. PAL Robotics will be providing the TIAGo platforms also during this week for up to 4 team members per team. Just make sure you bring any additional hardware you might need.
Due to current situation, PAL Robotics will also provide a remote support.
Work with PAL Robotics’ team during one week before IROS to have everything ready to go for the demonstrations!
Free entrance to IROS for students
IROS 2021 will take place virtually from September 27 to October 1 and. The IROS 2021 organization is kind enough to provide free entrances to the exhibitions and the competitions to the students from the finalist teams that participate in the Mobile Manipulation Hackathon. This will make sure you will have the chance to visit the exhibition when you are not working on your demonstration!
Cash Prizes
Generous cash prizes will be awarded by competition sponsors for the winning hackathon teams: 2.000€ will be awarded between the top two teams.
More to be announced
Stay tuned for more prizes or advantages as some have yet to be announced!
Organizers
Technical committee of Mobile Manipulation
Co-chairs of the technical Committee:
Georgia Chalvatzaki, TU Darmstadt, georgia.chalvatzaki@tu-darmstadt.de
Mehmet Dogar. University of Leeds. m.r.dogar@leeds.ac.uk
Nikolaus Correll, University of Colorado at Boulder. nikolaus.correll@colorado.edu
Kensuke Harada, Osaka University, Japan. harada@sys.es.osaka-u.ac.jp
Roberto Martin-Martin, Stanford University, USA. roberto.martinmartin@cs.stanford.edu
PAL Robotics
Francesco Ferro, francesco.ferro@pal-robotics.com
Carlos Vivas, carlos.vivas@pal-robotics.com
Jordi Pages, jordi.pages@pal-robotics.com
C/ Pujades 77-79, 4-4
08005 Barcelona, SpainLocal
Committee
Carlos Vivas, carlos.vivas@pal-robotics.com
Maximo A. Roa, German Aerospace Center – DLR. maximo.roa@dlr.de

PAL Robotics

German Aerospace Center – DLR

University of Colorado

University of Leeds

Osaka University

TU Darmstadt
Sponsors
Gold Sponsor

Bronze Sponsor

Organizing Sponsors


QUESTIONS or DOUBTS ?
If you have any doubts or questions, please contact the organization via the following email and we will be happy to answer your questions!
























